Steering System
Definitions
Track circle diameter Ds
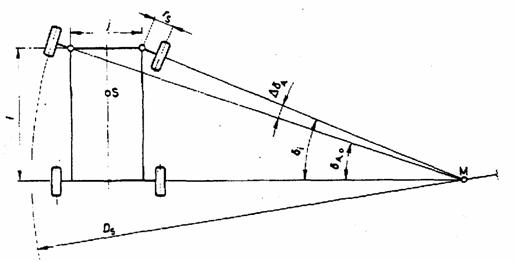
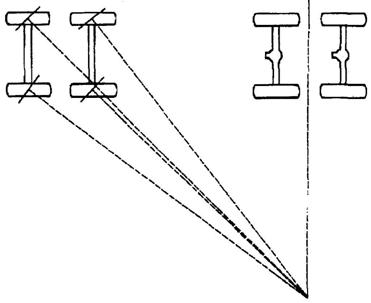
It can be calculated using the angle δA,o (as shown in the figure), i.e. the diameter of the circle which the outer front wheel traces with the largest steering angle. The track circle of a vehicle should be as small as possible to make it easy to turn and park.
![]()
The formula derived using the illustration shows that this requirement necessitates a short wheelbase and a large steer angle δA,o on the outer wheel of the bend. This in turn requires an even larger inner wheel angle, which is limited by the fact that the fully turned compressing wheel may not come into contact with the wheel house or the front axle components. The wheel house cannot be brought too far into the side of the front foot well as the pedals would then be at an angle to the direction in which the driver faces and foot-space would be restricted. In front-wheel drive vehicles, room also needs to be allowed for snow chains and the largest working angle of the drive joints.
|
|
|
Fig. Kinematic relationships in accordance with Ackermann between the steering angle δA,o on the wheel on the outside of the bend and δi on the inside of the bend. The illustration also shows the D δA and the track circle diameter Ds |
Turning circle curb to curb (kerb to kerb) Dtc, cb
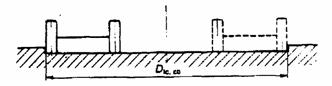
The track circle radius is basically only a theoretical value which can be calculated at the design stage; for the driver it is the turning circle curb to curb that is important, in the other words the distance between two normal height curbs (see the figure) standing parallel to one another, between which the driver can just turn the vehicle. This circle diameter Dtc, cb can be measured but can also be calculated easily using the track circle diameter Ds and the actual width of the tire B.
Dtc, cb = Ds + B [m]
|
|
|
Fig. Turning circle kerb to kerb Dtc, cb an important dimension tor the driver when turning the vehicle. |
Turning circle
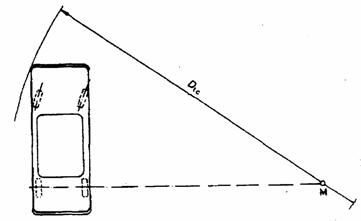
However, the turning circle, the diameter of which D is greater than that of the track circle by the front overhang length L is probably a more important dimension. is the diameter of the smallest cylindrical envelope in which the vehicle can turn a circle with the largest steering input angle (as can be seen in the figure). The smallest turning circle can be calculated at the design stage, but is easier to measure and appears as manufacture’s information in the specifications or as a measurement value in test reports.
|
|
|
Fig. The turning circle Dtc is the arc described by the parts of the vehicle protruding furthest outwards when the wheels are turned in at the largest steering angle. |
Example
|
Vehicle make |
Mercedes-Benz |
Mercedes-Benz |
|
Vehicle model: |
(190E 1.8) |
(600 SEL) |
|
Vehicle length: Vehicle width: Vehicle height: Wheelbase: Track, front/rear: Turning circle diameter Ground clearance |
4448 [mm] 1690 [mm] 1375 [mm] 2665 [mm] 1437/1418 [mm] 10.6 [m] 155 [mm] |
5115 [mm] 1885 [mm] 1500 [mm] 3040 [mm] 1600/1575 [mm] 12.5 [m] 150 [mm] |
Type of Steering:
Multi axle steering (twin steered vehicle) :
|
|
|
Figure On an eight-wheeled vehicle some lyre scrub must occur on rear wheels by not turning through a common centre. All front wheels turn through d angles |
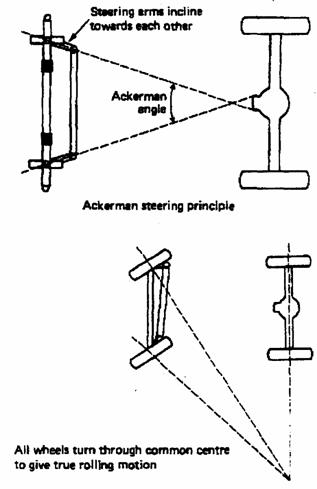
For twin steered vehicles, when both the front wheels are turned, each axle must have its own Ackermann linkage. This alone does not give true rolling of all the wheels because the front set of wheels have to turn through different angles from the second set of wheels. In order to achieve this, the connection between the two axles is designed to give a greater degree of turn to the front set wheels.
When more than one axle is used at the rear of the vehicle, true rolling motion cannot be achieved because these wheels cannot normally be turned. The further these axles apart the greater the amount of scrub. In order to even out wear therefore, the axles should be as close together as possible and the center of rotation taken through a line midway between the axles.
Rear wheel steering systems:
Rear-wheel steering systems serve to improve the stationary and dynamic steering characteristics.
Principles
At moderate and high-speed, turning the rear wheels in the same direction as the front wheels, for a controlled brief period of time, leads to an increase in car stability. At low speeds, turning them in the opposite direction improves maneuverability (reduction of the turning circle by approximately 10%).
Functions
The input variables of the system are the steering-wheel angle and the driving speed. For system safety reasons, these are recorded redundantly. From these figures the control unit determines the optimum angle (desired value) of the rear wheels compares this value with the actual value and generates the appropriate output signal for the servo actuator. The servo actuator quickly and precisely adjusts the rear-wheel steering angle to the prescribed desired value. The required dynamic control of the cylinder position is by means of a digital position controller.
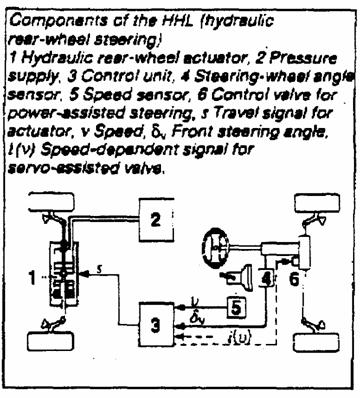
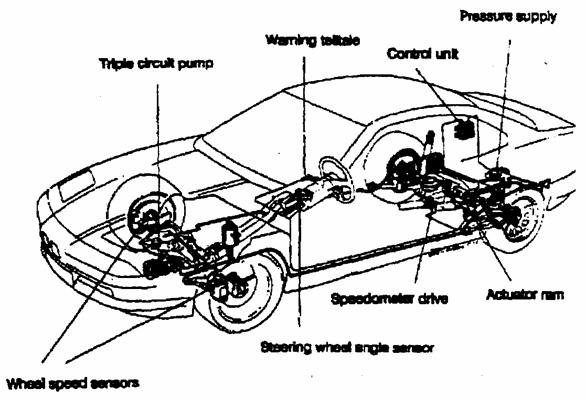
Components
Sensors:
A non-contact, inductive sensor ascertains the front wheel steering angle indirectly via the steering-wheel angle. The driving speed is ascertained by means of ABS wheel- speed sensors and via the speedometer signal.
Control unit:
The control unit is a two-channel computer. The two computers compare their results with each other, in case of discrepancies; conventional front-wheel steering is retained.
Actuator:
The actuator sets the desired rear-axle steering angle and which can be electrical, mechanical, or hydraulic. The hydraulic rear wheels via steering tie rods fitted on both sides. It includes electrically controllable hydraulic valves, s servo cylinder as well as sensors for the rear-wheel angle. The servo-actuator pressure supply circuit consists of a pressure accumulator, an accumulator charge valve, a pressure sensor and the radial piston pump driven by the IC engine.
|
|
|
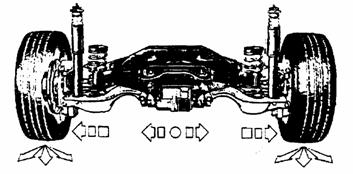
Fig. Hydraulic rams mounted in the centre of the rear axle sub-frame |
|
|
|
|
|
The BMW active rear axle shown here operates under computer control to reduce rear slip angles according to road speed and steering input algorithms |
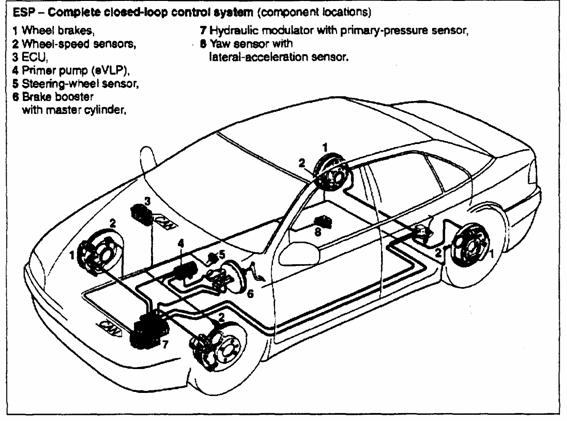
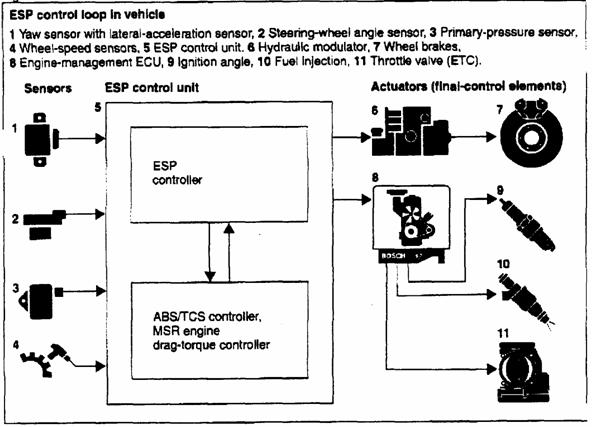
Electronic Stability Program (ESP)
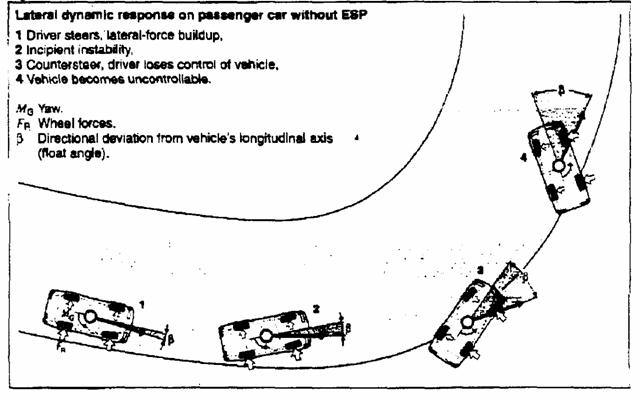
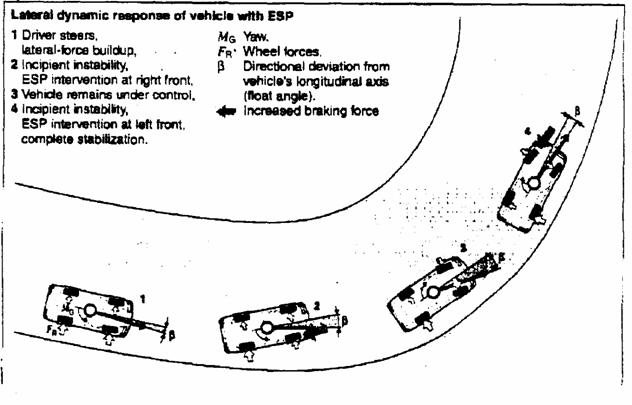
The electronic stability program is a system relies on the vehicle’s braking system as a tool for “steering” the vehicle. Specific braking intervention is directed at individual wheels (such as the left rear to counter understeer, or the right front during oversteer, as shown in the figures). For optimal implementation of stability objectives, ESP not only initiates braking intervention, but it can also intervene on the engine side to accelerate the driven wheels.
|
|
|
|
|
|
|
|
Steering geometry
This is the alignment of the road wheels and therefore the stub axles which make sure that the steering is accurate and responsive. Correct alignment will also help to ensure minimum tire wear. The main angles of steering geometry are concerned with castor, camber, kingpin inclination and Ackerman angle.
Castor angle
This is the inclination of the kingpin towards the rear of the vehicle which gives the wheel a trailing effect and makes it act very similarly to a castor wheel on a piece of furniture.
|
|
|
Castor angle |
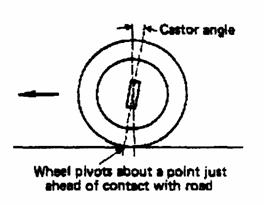
In practice the inclination of the kingpin to give castor angle is very small - up to 2o - which means that the wheel pivots about a point just in front of the point of contact between tire and road surface. The effect of this inclination of the kingpin is to give the steering wheel a self-centering action, which means that if the driver lets go of the steering wheel, the road wheels will return to the straight ahead position. This means that the driver does not have to ‘steer’ the vehicle when traveling in a straight line. The effect also gives the driver some ‘feel’ of the position of the road wheels when traveling at speed. It does not affect the maneuverability of a vehicle at low speeds as the magnitude of this returning force depends upon the drag force which increases with speed.
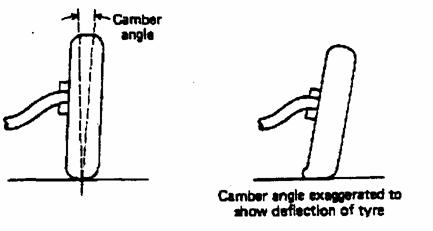
Camber angle
This is the inclination of the wheel outwards from the centre of the vehicle. This again is a very small angle - up to 2°. By giving the wheel this inclination, sensitivity through the tire to the steering wheel is reduced for small movements of the road wheel. Such movements may be experienced when traveling over rough surfaces, e.g. cobbles. Instead of these small movements being transmitted through the steering linkages they are absorbed in the distorted tire and the vehicle keeps a straight ahead path.
|
|
|
Camber angle |
Kingpin inclination (KPI)
This is the inclination of the kingpin towards the centre of the vehicle. A larger angle is usually given- 6-7° for this inclination - in order that the wheel may be ‘swiveled’ about a point on the road surface. If the kingpin was vertical, the wheel would have to revolve around a point below the centre line of the kingpin. This would lead to very ‘heavy’ steering, particularly at low speeds, and also a twisting force when the wheels hit a bump or pothole.
|
|
|
|
|
Kingpin Inclination |
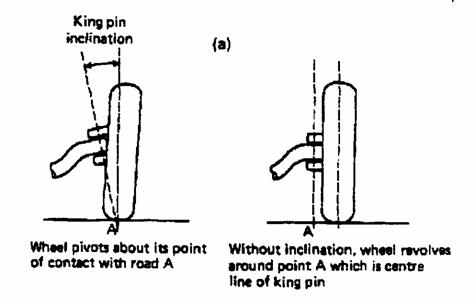
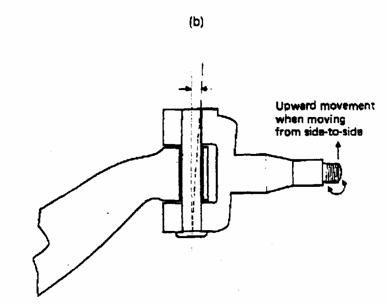
This inclination also gives a small amount of self-centering action which is particularly useful at low speeds. When the wheel is turned about the inclined kingpin the front of the vehicle is slightly raised, and thus the weight of the vehicle tends to help to return the wheels to the straight ahead position.
Ackerman angle
When a vehicle turns a corner, all the wheels must turn through a common centre in order that they may have a true rolling action and not scrub across the road surface. Although this is impossible to achieve under all conditions, it was found by a man named Ackerman, that by inclining the steering arms towards each other so that a line projected from each kingpin meets at a point on the centre-line of the vehicle just ahead of the rear axle, then almost true rolling action is obtained. The rear wheels are fixed to a solid axle and therefore this centre of rotation must lie on a line projected through the rear axle.
|
|
|
Ackerman angle |
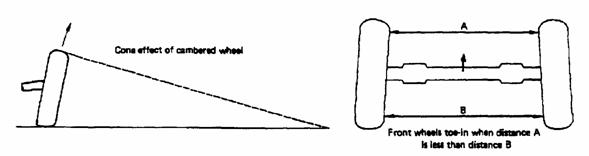
Front wheel alignment
When a vehicle is traveling straight ahead both the front wheels must be parallel otherwise rapid tire wear will result. Because the wheels are cambered, the cone effect produced by this makes the wheels splay outwards as soon as the vehicle is moved forwards. The track rod prevents this from happening, but any slight play in the track rod ends must be accounted for. This means that the wheels must be set to toe-in when stationary, as soon as they move forward they then assume a straight ahead position.
|
|
|
Front wheel alignment |
Steering Ratio
The steering ratio is defined as the ratio of steering wheel rotation angle to steer angle at the road wheels. Normally these range from 15-20 to 1 on passenger cars, and 20-36 to 1 on trucks. The steering ratio and the steering linkage determine “number of steering wheel turns form lock to lock”. Some power steering has less than two turns of the wheel from lock to lock an extreme-but figures of 2.5 to 3 are more common.
Steering linkages
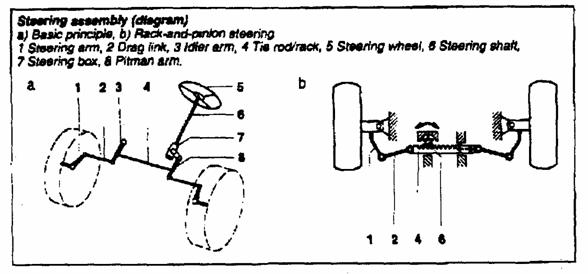
The steering systems used on motor vehicles vary widely in design, but are functionally quite similar. The figure illustrates some of these.
The steering wheel connects by shafts, universal joints, and vibration isolators to the steering gearbox whose purpose is to transform the rotary motion of the steering wheel to translational motion appropriate for steering the wheels.
|
|
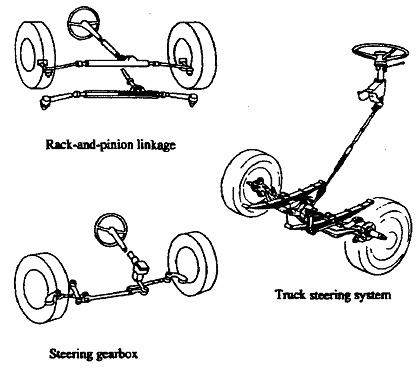
The rack-and pinion system consists of a linearly moving rack and pinion, mounted on the firewall or a forward cross member, which steers the left and right wheels directly by a tie-rod connection. The tie-rod linkage connects to steering arms on the wheels, thereby controlling the steer angle. With the tie rod located ahead of the wheel center, as shown in the figure, it is a forward-steer configuration.
The steering gearbox is an alternative design used on passenger cars and light trucks. It differs from the rack-and-pinion in that a frame-mounted steering gearbox rotates a pitman arm which controls the steer angle of the left and right wheels through a series of relay linkages and tie rods, the specific configuration of which varies from vehicle to vehicle. A rear-steer configuration is shown in the figure, identified by the fact that the tie-rod linkage connects to the steering arm behind the wheel center.
Between these two, the rack-and-pinion system has been growing in popularity for passenger cars because of the obvious advantages of reduced complexity, easier accommodation of front-wheel-drive systems, and adaptability to vehicles without frames. The primary functional difference in the steering systems used on heavy trucks is the fact that the frame-mounted steering gearbox steers the left wheel through a longitudinal drag line, and the right wheel is steered from the left wheel via a tie-rod linkage.
The gearbox is the primary means for numerical reduction between the rotational input from the steering wheel and the rotational output about the steer axis. The steering wheel to road wheel an ratios normally vary with an values on the order of 15 to 1 in passenger cars, and up to as much as 36 to 1 with some heavy trucks. Initially all rack-and-pinion gearboxes had a fixed gear ratio, in which case any variation in ratio with steer angle was achieved through the geometry, of the linkages.
Today, rack-and-pinion systems are available that vary their gear ratio directly with steer angle.
|
|
|
Illustration of typical steering systems |
The lateral translation produced by the gearbox is relayed through linkages to steering arms on the left and right wheels. The kinematics geometry of the relay linkages and steering arms is usually not a parallelogram (which would produce equal left and right steer angles), but rather a trapezoid to more closely approximate “Ackerman” geometry which steers the inside wheel to a greater angle than the outside wheel.
Power steering
A variety of causes has combined to make static steering torques greater; low profile tires, the radial tires, the tendency to front wheel drive and consequent greater concentration of weight at the front of the car.
- Hydraulic power steering system
With oil pump is directly driven by the engine and constantly generate a hydraulic power.
- Elector-hydraulic power steering system
The power steering pump driven by the engine of the vehicle via V-belt is replaced by an electrically operated pump.
- Electrical power steering system
The bypass of the hydraulic circuit and direct steering boost with the aid of an electric motor has additional advantages in terms of weight and engine bay compared with electro-hydraulic steering, because of the omission of all the hydraulic components.
Steering column
Three types of steering tube configuration meet the requirements of safety in car crash.
- Steering tube with flexible corrugated tube portion.
- collapsible (telescopic) steering tubes.
- detachable steering tubes.
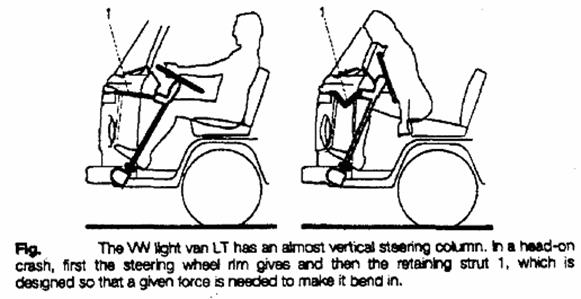
On light vans, the steering column is almost vertical. In heat-on crash the outer tube bracket I and the steering wheel skeleton must flex as seen in the figure.
|
|